研究内容Research
無人航空機による利用システム
1. 複数無人航空機による同時観測を可能とする
高精度・高応答追尾アンテナ制御システム
研究目的
災害や大型建造物など人が容易に立ち入れなかったり,確認できない場所の観測を行うために近年,UAVの利用が考えられており,複数のUAVを用いることで広域や長距離などの観測では有効です.
また,リアルタイムで観測する場合には地上局と通信が常に確保されている必要があります.そこで,
機体を途切れることなく追尾し,複数機体を用いる場合には対象機体を迅速に切り替えることができる
高精度・高応答の追尾アンテナ制御システムの構築を目指しています.
研究方法
ハードの特性から誤差を考え,設計における目標値を作ります.その値から,以下の手順で研究を行っています
1.PCでシミュレーションを行い制御器の設計と選定及び目標との確認
2.2軸ジンバル構成の雲台を用いて,外部入力による動作の確認とマルチコプターを用いた実機による実験
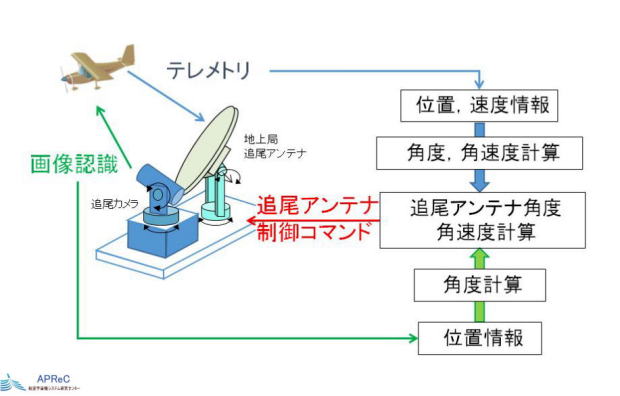
UAVの追尾アンテナ概略図
今後の展望
1.これまでの研究の結果から,制御のオーバーシュートや偏差が残るなど実験を通して明らかになった
課題の解決を目指します.
2.複数のUAVを用いて追尾対象の切り替えについての制御を目指します.
このページの先頭へ

